Multiplying Quaternion Matrices
If the order is one way it will occur on the global axis and if you do it the other way it will occur on the local axis. For example to apply a p quaternion followed by a q quaternion multiply in the order pq.
Quaternion Rotation Umbc Graphics For Games Representing Rotation
Create a quaternion R4DEngineR4DQuaternion q90axis.

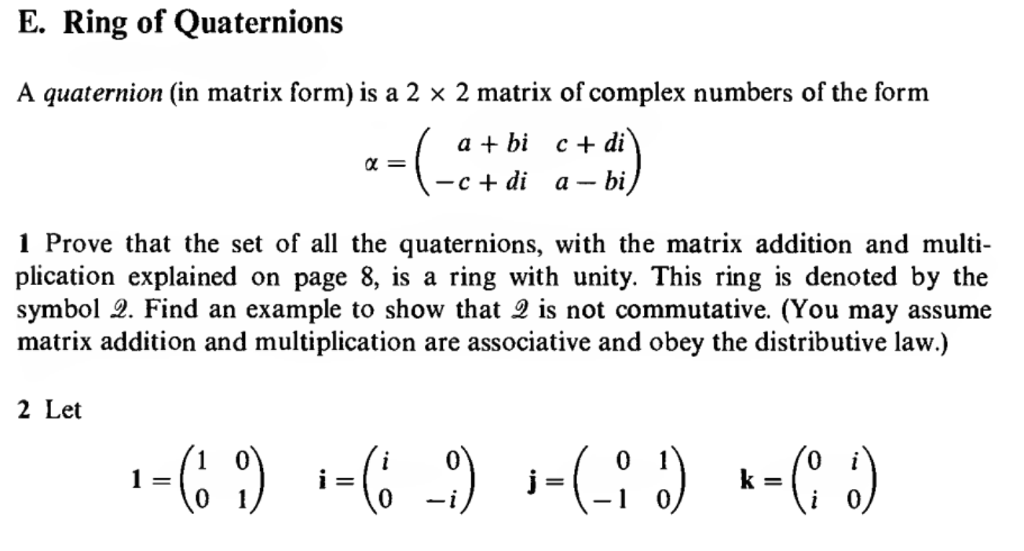
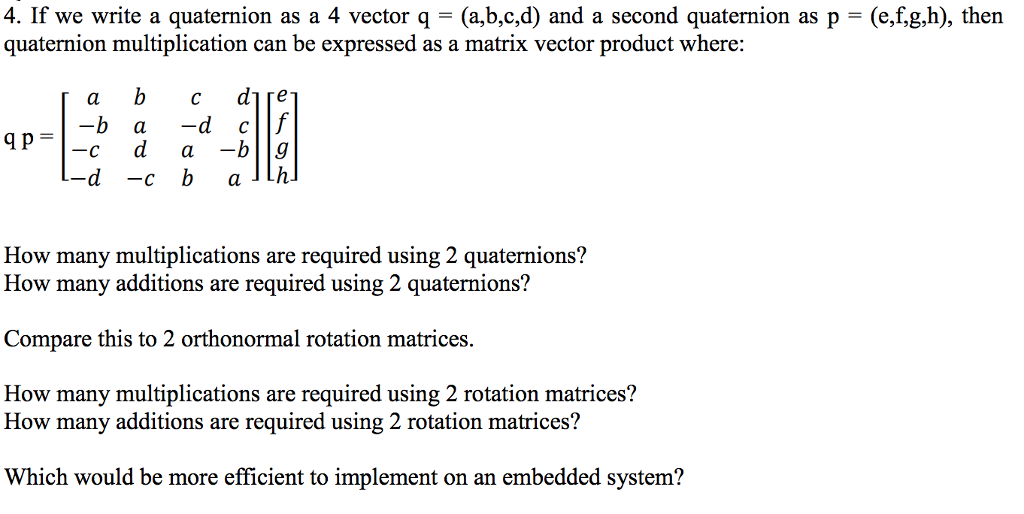
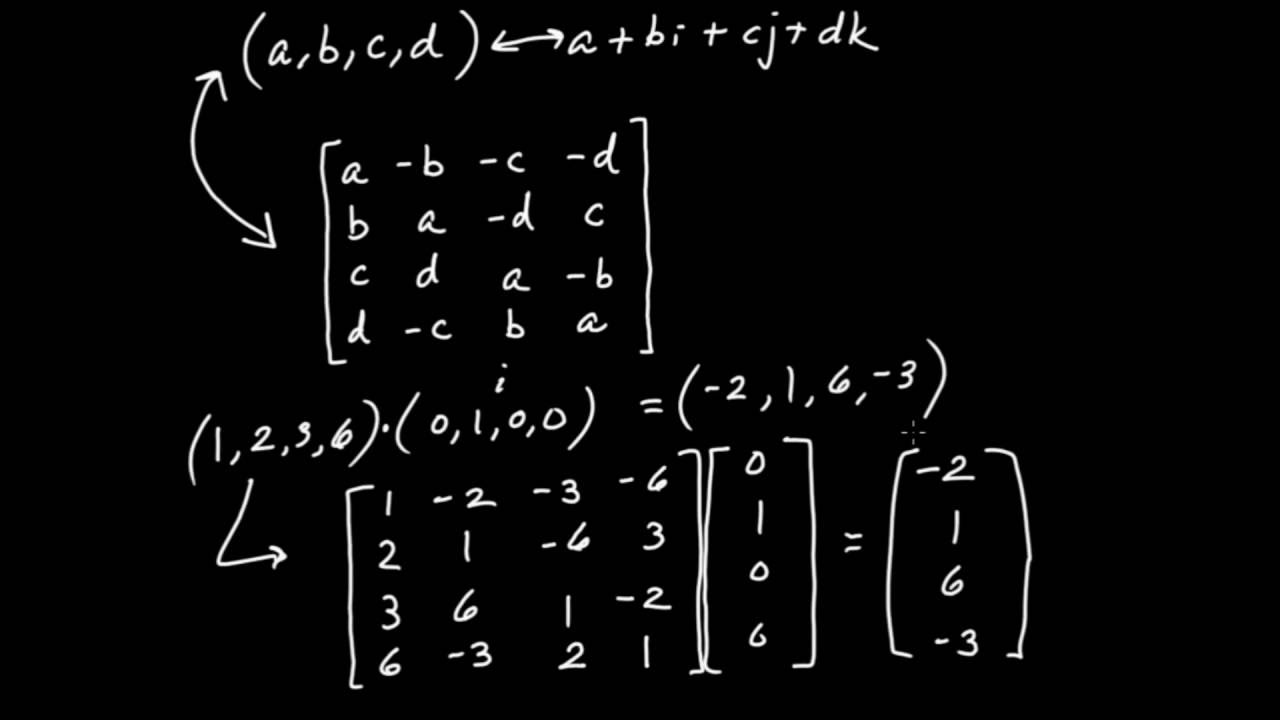
Multiplying quaternion matrices. Both matrix multiplication and quaternion multiplication are non-commutative. More specifically consider the quaternion q above and another quaternion p p0 p1ip2j p3k. This matrix formula is just an expanded form of the Cayley-Dickson multiplication formula a b c d ac bd bc da so the algebra of these matrices represents the algebra of the quaternions.
Multiplying quaternions Two quaternions can be concatenated by multiplying them together. In Quaternion maths multiplying by the inverse is the equivalent of subtracting the rotation. A quaternion x y z w which represents a general rotation can be interpreted geometrically as follows.
Every quaternion q has a negative q with components q i i. The right quaternions rotation is applied first and then the left quaternions. Now suppose I construct a quaternion matrix as described here.
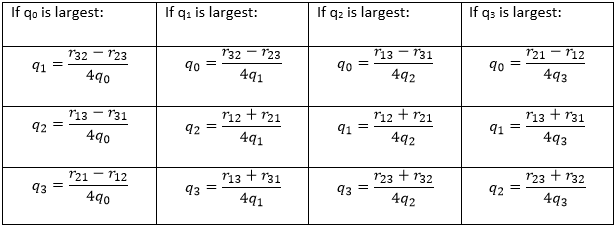
This page discusses the equivalence of quaternion. V v 2 r x s v r x v m where x represents the cross product s and r are the scalar and vector parts of the quaternion respectively and m is the sum of the squares of the components of the quaternion. To compose a sequence of frame rotations multiply the quaternions in the order of the desired sequence of rotations.
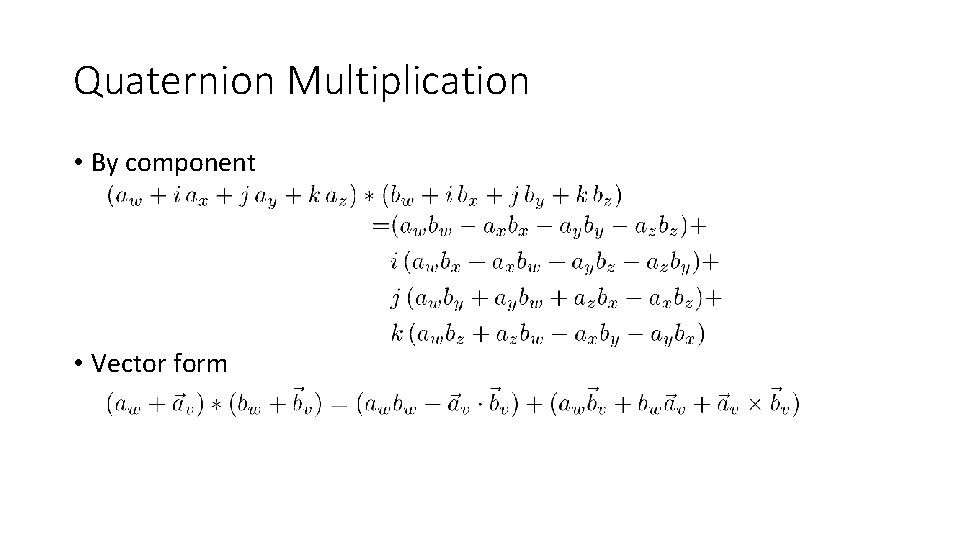
The rotation operator becomes where v represents the object to rotate specified in quaternion form. But with quaternions I believe its backwards from the way it is for matrices. Quaternion Multiplication We can perform multiplication on quaternions if we expand them into their complex number form If q represents a rotation and q represents a rotation then qq represents q rotated by q This follows very similar rules as matrix multiplication in particular it is not commutative qsiq 1 jq 2 kq 3 qqsiq 1 jq 2.
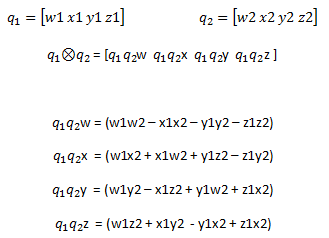
21 Addition and Multiplication Addition of two quaternions acts componentwise. Doing that you will get a formula equivalent to the Euler-Rodrigues Formula. I also know that I can do quaternion multiplication to get the combined rotation of 2 quaternions q1 and q2 by using quaternion multiplication q q1q2 as expressed here.
Q QuaternionMultiplyqX qY. Then we have pq p0 q0 p1 q1ip2 q2j p3 q3k. Multiplying a quaternion by a scalar in the engine is done as follows.
Quaternion multiplication and orthogonal matrix multiplication can both be used to represent rotation. Aerospace Toolbox uses quaternions that are defined using the scalar-first convention. Furthermore suppose I do that for three coordinate axes to construct three quaternion matrices Qx Qy and Qz.
Hence the use of terms like premultiplication and postmultiplication. A unit-length quaternion also referred to here as a unit quaternion ˆq is created by dividing each of the four components by the square root of the sum of the squares of those components Eq. In this video we will see that the quaternions may.
The matrices are all of the same form with regard to minus signs and conjugation so as above with the matrices representing the algebra of complex numbers the set of matrices is closed under multiplication. Multiplication of a quaternion q by its inverse q 1 results in the multiplicative identity 1 0 0 0. Transformations are concatenated in the same order for the QuaternionMultiply and MatrixMultiply methods.
In the following C code example assuming that mX and mY represent the same rotations as qX and qY both m and q represent the same rotations. C m MatrixMultiplymX mY. Create an axis vector R4DEngineR4DVector3n axis100.
In math its usually possible to view an object or concept from many different but equivalent angles. Quatprod quatmultiply qr calculates the quaternion product quatprod for two quaternions q and r. Like with matrices the operation is carried out from right to left.
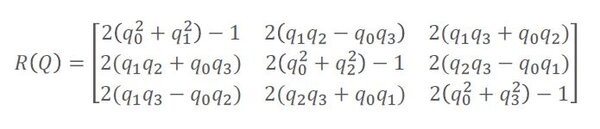
If a quaternion is represented by qw i qx j qy k qz then the equivalent matrix to represent the same rotation is. Scalar multiplication R4DEngineR4DQuaternion nQq3. That is to say that if C A inverse B then C B A.
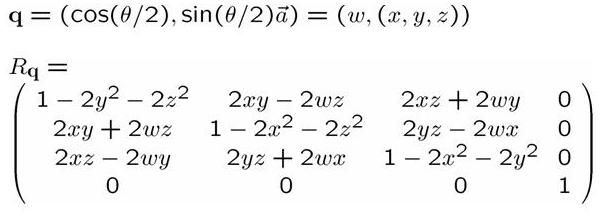
X X sinα 2 y Y sin α 2 z Z sin α 2 w cosα 2 Here X Y Z is the unit length axis of rotation in 3D space and α is the angle of rotation about the axis in radians. On multiplying quaternion matrices. I believe the order of quaternion multiplication is opposite the order of matrix multiplication.
Add Quaternion Matrices And Quaternion Rates Matrices Issue 113 Moble Quaternion Github

E Ring Of Quaternions A Quaternion In Matrix Form Chegg Com
Cs184 Using Quaternions To Represent Rotation
Unit Quaternion Description Of Spatial Rotation In 3d Electron Cryo Microscopy Biorxiv
Cs184 Using Quaternions To Represent Rotation

Quaternions
Quaternion Handwiki
Quaternions Basics Gps

Quaternion Vs Rotation Matrix 4 If We Write A Chegg Com
Quaternions Topics Introduction To 3d Game Programming With Directx 12 Computer Science 2016

4 If We Write A Quaternion As A 4 Vector Q A B C D Chegg Com
Process Of Creating First Order Quaternions From An Initial Rotation Download Scientific Diagram

Quaternions
Orientation Quaternions Ppt Video Online Download
Quaternion
Lecture 9 6 837 Fall 01
Quaternions As 4x4 Matrices Connections To Linear Algebra Youtube
Cs184 Using Quaternions To Represent Rotation
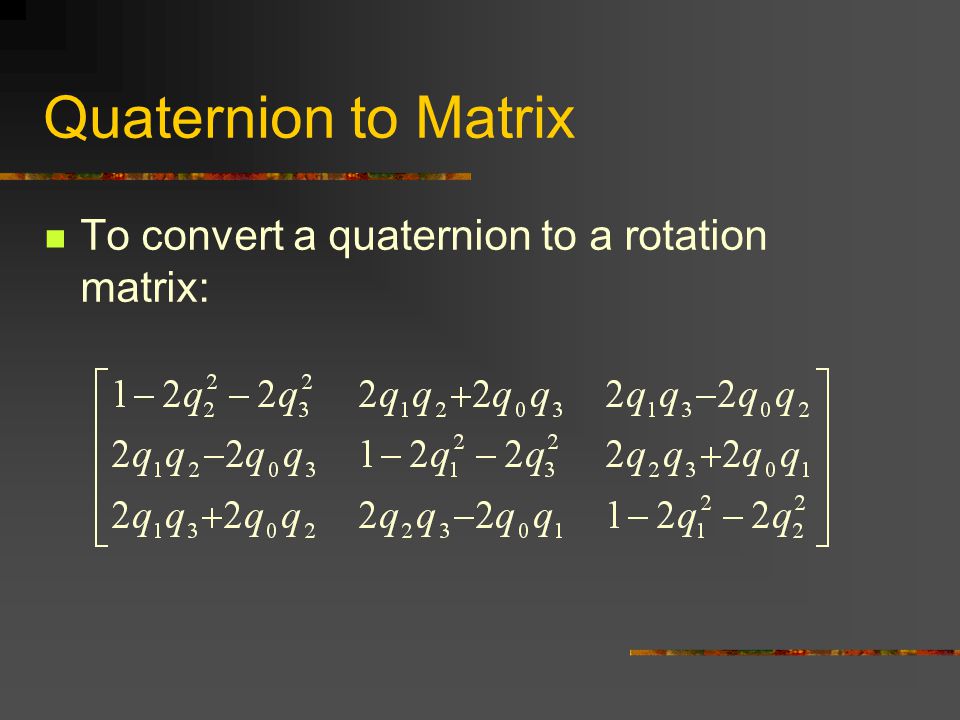
How To Convert A Quaternion To A Rotation Matrix Automatic Addison